







Description
 Le micromanipulateur motorisé VI-MM-500 est conçu pour répondre aux divers besoins de micro-positionnement de la communauté scientifique pour les expériences de patch-clamp, l’enregistrement extracellulaire, la microinjection, l’enregistrement intracellulaire et les applications de positionnement robotique de précision.
Le micromanipulateur motorisé VI-MM-500 est conçu pour répondre aux divers besoins de micro-positionnement de la communauté scientifique pour les expériences de patch-clamp, l’enregistrement extracellulaire, la microinjection, l’enregistrement intracellulaire et les applications de positionnement robotique de précision.
Il autorise un positionnement rapide et précis. Il fonctionne de manière plus stable et fluide que la plupart des micromanipulateurs courants. Le mode diagonal unique rend le travail beaucoup plus efficace !
Il est très compact avec un faible empreinte paillasse. Comme l’espace est généralement limité dans les pièces d’électrophysiologie, la petite taille est vraiment un atout non négligeable. Une grande variété d’acccéssoires peuvent y être fixés: micro-électrode de verre, pousse seringue etc
Avantages:
Interface et commande:
Ecran TFT tactile avec affichage des coordonnées absolue ou relative, RAZ fonction verrouillage, affichage du mode sélectionné sur l’encodeur ( approche grossière ou fine) continue ou pas pas programmé. et un menu avancés pour tous les réglages généraux et cal du zéro.
Double commande rotative à encodage photo-electrique pour deux micro-manipulateurs, bouton de sélection du mode continue ou par pas programmé, déplacement linéaire ou diagonale, bascule entre les deux micromanipulateurs, bouton de sélection d’un point spécifique comme origine.
Minimise la dérive pour assurer la stabilité du signal
Assurez la stabilité du signal lors enregistrements au long court dans les expériences de patch-clamp. Très précis avec un repositionnement pour améliorer la reproductibilité des résultats des expériences. (un seul axe ≤1μm, trois axes ≤2μm).
Plusieurs modes permettent une utilisation adaptée
Le mode continu/pas à pas permet de contrôler avec précision la vitesse de déplacement et la distance du manipulateur. Le chercheur peut ajuster la vitesse de translation de 0,033 μm/s à 2904 μm/s selon les besoins. Les axes X et Y peuvent être déplacés simultanément avec le mode Diagonal pour ajuster facilement votre angle d’approche entre 1 et 89 °.
Positionnez-vous avec précision et facilité
Il suffit de sélectionner la fonction [ORIGIN] ou [WORK] pour effectuer un aller-retour rapide entre les positions préréglées et gagner un temps précieux.

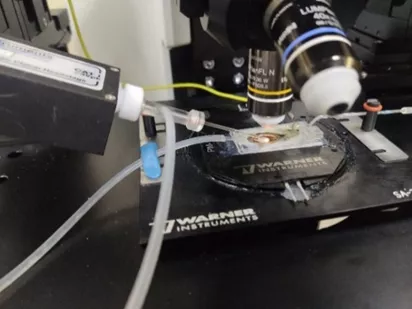
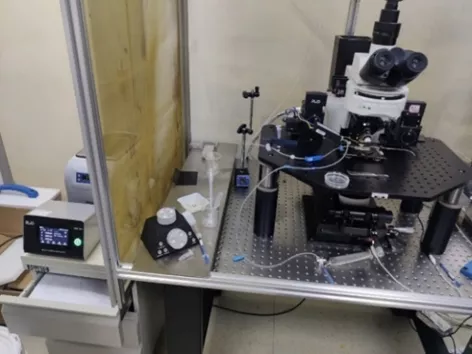
Examples d’applications
 |
 |
 |
 |
 |
 |
| Expériences electro-physiologiques patch clamp | Injection de virus | Injection par voie oculaire | Injection de nématodes | Positionnement physiologique de précision | Manipulation d’embryon de poissons zèbres |



-500x500.jpg)