Description
Contexte
La locomotion chez le rongeur est un comportement complexe impliquant l’intégration des systèmes musculo-squelettiques, neurologiques et sensoriels pour produire un mouvement coordonné.
De ce fait, la démarche est un marqueur sensible des dysfonctionnements moteurs, largement utilisé dans les modèles de neurodégénérescence, de traumatisme, de douleur, d’arthrite et de douleur chronique (Clark et al., 2019 ; Sayed-Zahid et al., 2019).
Les premières méthodes d’analyse de la démarche chez les rongeurs, comme la prise d’empreintes de pattes à l’encre sur papier, fournissaient des informations difficilement exploitables en nombre sur la longueur de la foulée et le positionnement des pattes. Bien qu’encore utilisées pour un screening de base, ces méthodes manquent de résolution et d’objectivité nécessaire pour détecter des déficits moteurs subtils ou précoces.
Les rongeurs, en tant que quadrupèdes et proies, masquent souvent les signes de douleur ou de handicap (Mogil, 2015). Leur capacité à transférer leur poids d’un membre à l’autre (par exemple, en compensant une blessure à un membre postérieur par une charge sur les membres antérieurs) peut masquer davantage les déficits détectables chez les espèces bipèdes (Saunders et al., 2017). Pour surmonter ces difficultés, les dispositifs de mesure automatisés d’analyse de la marche sont devenus essentiels en neurosciences, pharmacologie et toxicologie.
Ces outils offrent des évaluations avec de nombreux paramètres dérivés à haute résolution, telles que la durée de la phase d’appui, la variabilité de la foulée et la coordination inter-membres, enregistrés dans des conditions de marche spontanées. Le principal défi actuel de l’analyse automatisée de la marche est l’identification correcte de chacune des pattes afin de calculer tous les paramètres d’intérêt automatiquement et sans intervention de l’opérateur.
Description
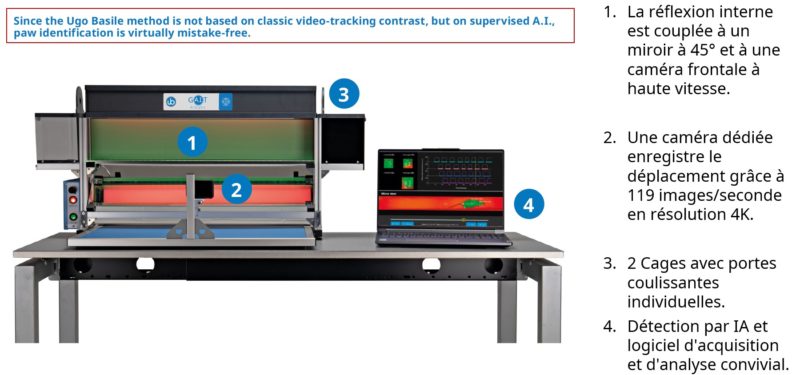
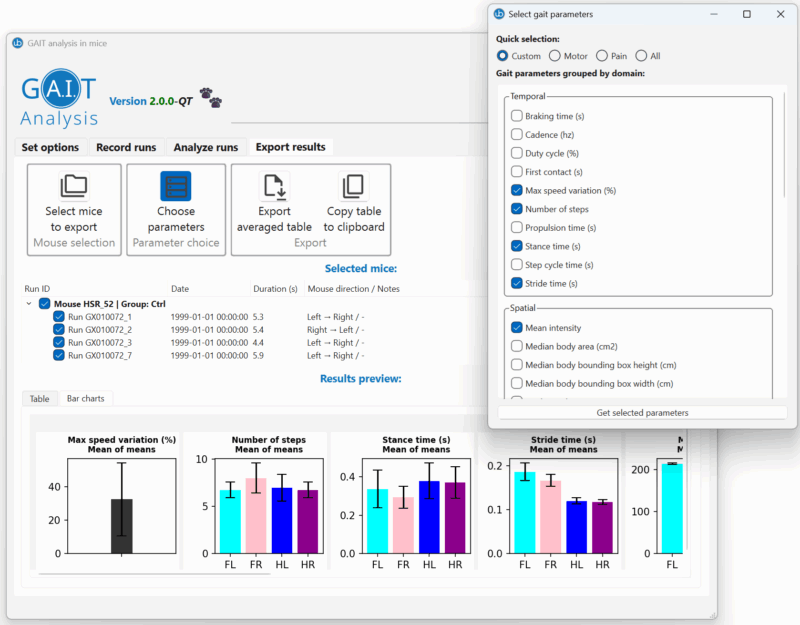
Le Système GA.I.T de Ugo Basile utilise un algorithme d’intelligence artificielle « supervisée » pour discriminer et identifier la position de chaque patte et chaque partie du corps à chaque image, au lieu des techniques d’imagerie traditionnelle et mal adaptées pour cette application.
Avantages
✅ Précision optimisée par l’IA : aucune correction manuelle nécessaire
✅ Compact, conçu pour tenir sur une paillasse de laboratoire
✅ Prix très compétitif
✅ Prêt à l’emploi : PC, caméra et logiciel préinstallés
Validation
Début 2025, une collaboration de deux mois avec le service d’éthologie murine de l’un des plus grands centres hospitaliers universitaires de Milan, qui héberge environ 50 000 souris et des dizaines de modèles murins de troubles moteurs, a été menée afin de corroborer des mesures sur souris sauvages et souris présentant des troubles moteurs avec un système existant de mesure de la marche utilisé en routine dans l’institut.
Après avoir entraîné le logiciel avec des souris « normales » et des souris présentant des troubles moteurs, voire des troubles très sévères, nous avons effectué une comparaison avec des systèmes traditionnels basés sur le contexte. Les résultats se sont avérés impressionnants :
Lors d’une étude comparative en double aveugle menée sur deux groupes de 16 animaux, le système Ugo Basile GA.I.T. et les autres systèmes ont produit des résultats intergroupes très similaires.
Le système d’identification des pattes au sol par le GA.I.T. était pratiquement parfait, sans quasiment aucune erreur.
Les autres systèmes nécessitaient souvent une identification manuelle des pattes, des corrections ou un ajustement des paramètres pour obtenir de bonnes performances.
Principaux paramètres disponibles (évolutif)
| Motor research | Pain & inflammation | Aging research |
|---|---|---|
| Spatial and Temporal Parameters: • Stride Length • Stride Time (variability) • Swing/Stance Time • Paw Angle Interlimb Coordination: Body Parameters: Tail Parameters: |
Load and Support Parameters: • Duty Cycle • Paw Print Area • Paw Intensity/Pressure • Paw Spread Compensatory Parameters: Tail Parameters: |
Stability and Coordination Parameters: • Stride Length • Stride Time variability • Base of Support • Regularity Index • Swing Time Postural Parameters: Tail Parameters: |